SLR - Fire Fighting Robot
![]()
Overview
SLR is a robot designed to participate in the Fire Fighting Robots Contest. It was engineered to complete three main tasks: collecting ping pong balls, extinguishing candles, and navigating various terrains. The robot was built with a focus on stability, versatility, and remote operation.
Features
- Chassis: Robust design with four mecanum wheels for optimal maneuverability.
- Arm: Five degrees of freedom (5-DOF) with servo motors for precise movements.
- Computer: Raspberry Pi 4 B+ with Quad-core Cortex-A72 processor and 8GB RAM.
- Remote Control: Operated via a PS4 controller connected through Bluetooth.
Components
1. Chassis
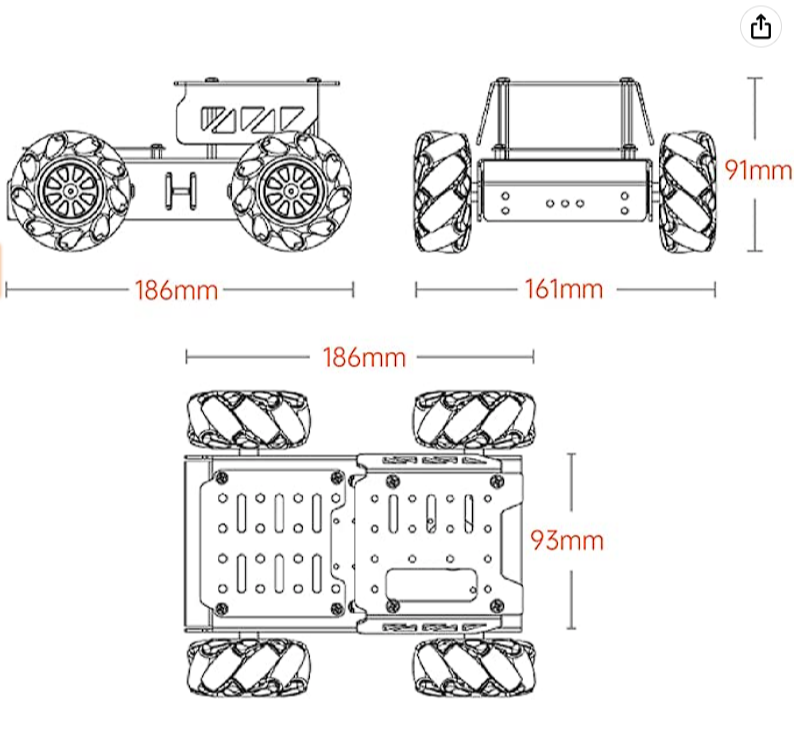
- Houses all the components.
- Equipped with four mecanum wheels for 360-degree movement.
2. Arm
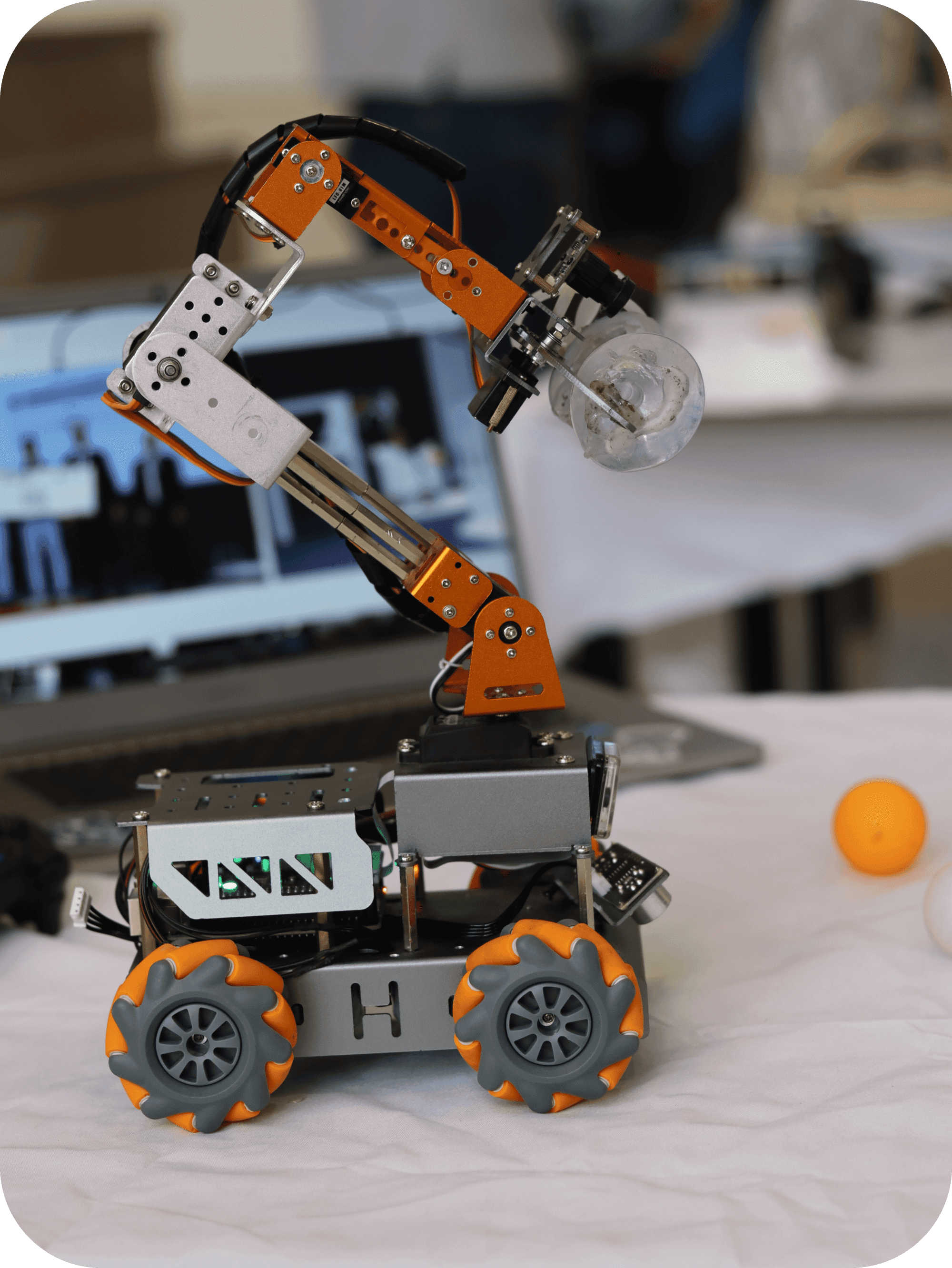
- Features five servo motors to control each joint.
- Capable of collecting ping pong balls and extinguishing candles.
3. Computer

- Raspberry Pi 4 B+.
- Manages all signals and processes tasks efficiently.
- Consumes less than 500mA.
Tasks
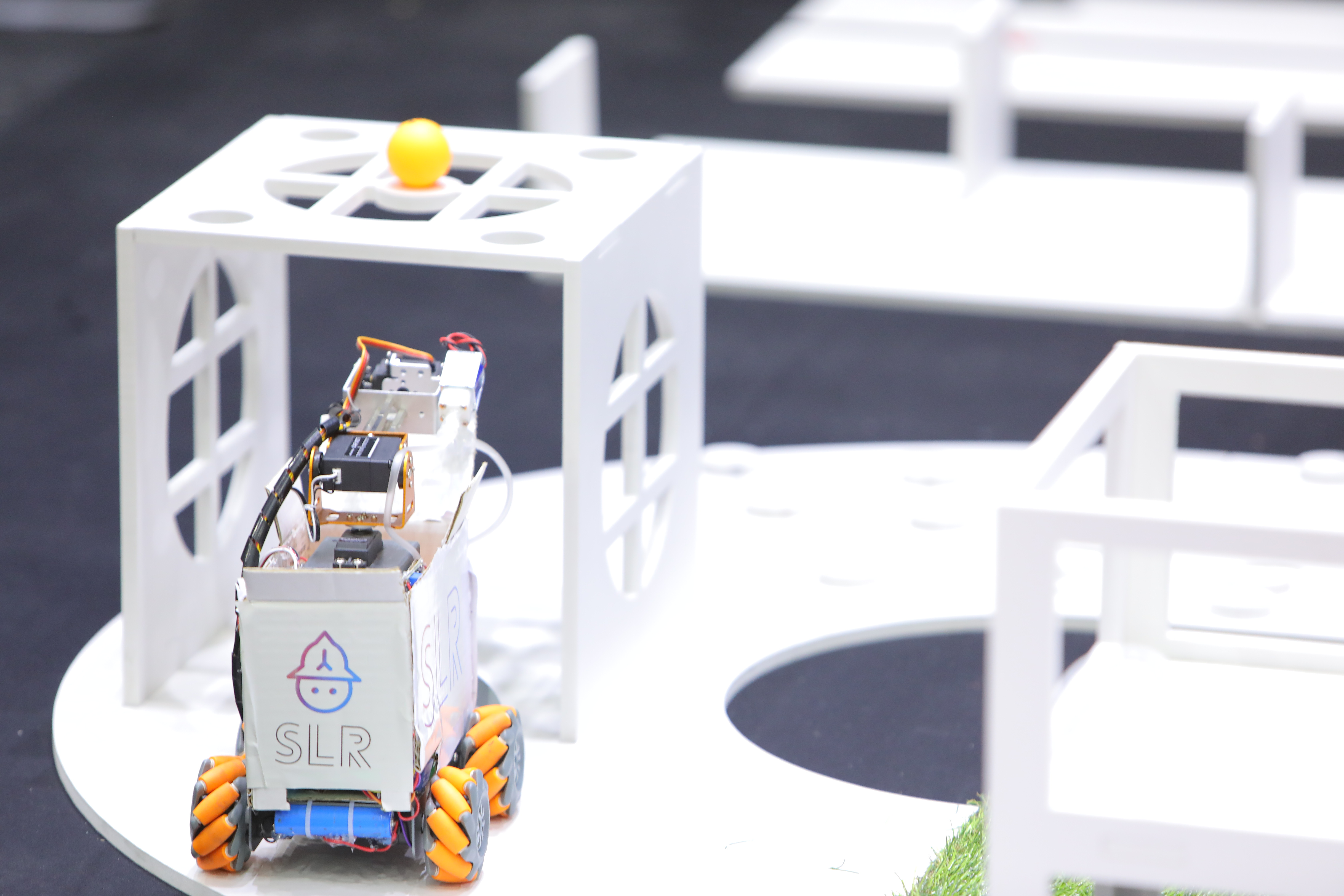
1. Collecting Ping Pong Balls

SLR collects ping pong balls to simulate rescuing people. The arm's precise movements allow it to pick up and place the balls in designated areas.
2. Extinguishing Candles
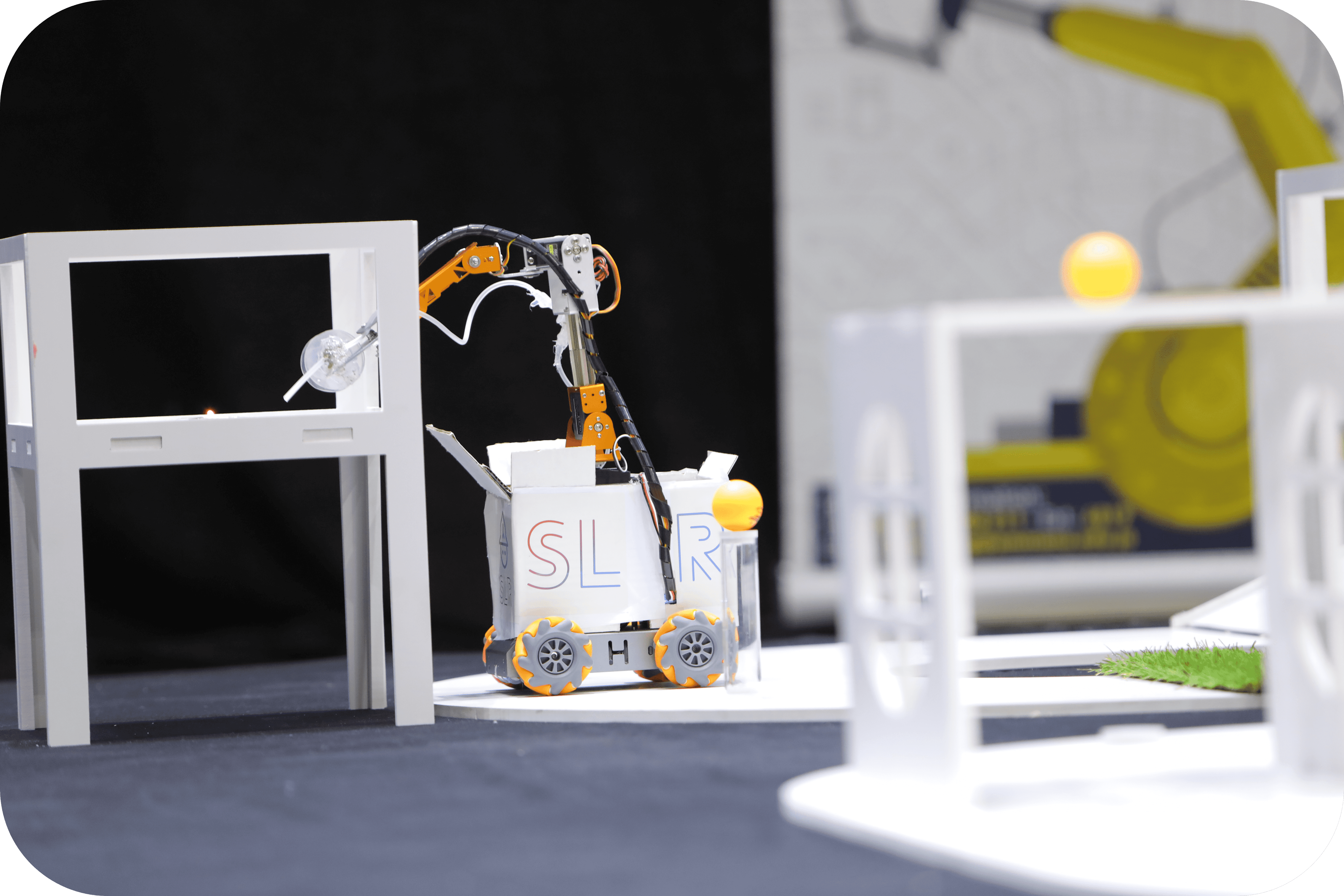
The robot extinguishes candles to simulate remote fire suppression. The arm accurately targets and extinguishes the flames.
3. Navigating Diverse Terrains
SLR navigates through hills, grass, and bumps using its mecanum wheels and robust chassis design.
Challenges
- Balance and Weight Distribution: Initially, the robot tended to tip over due to the arm's movement. This was solved by mounting the arm in the middle of the chassis.
- Latency Issues: The delay between the camera and the Raspberry Pi prevented us from implementing a computer vision algorithm for autonomous fire detection.
Achievements

- 2nd Place: Secured 2nd place in the 4th Fire Fighting Contest, outperforming 17 other university teams.
Team Members
- Coach: Dr. Abdulelah Al-Shabatat 🏆
- Team Members:
- AbdulQader Dada 👨💻
- Hamzeh Al-Bzour 🤖
- Mais Belal 🌟
- Rayan Al-mrayat 🚀
Installation
- Clone the repository:
git clone https://github.com/Abood-devo/SLR.FireFighting.git